 打印
打印
果园监控机器人自主行驶及视觉导航系统研究
编号
zgly0001744832


文献类型
期刊论文
文献题名
果园监控机器人自主行驶及视觉导航系统研究
作者
金李
高何璇
高晓阳
李红岭
杨梅
贾尚云
张旭
唐渲运
作者单位
甘肃农业大学机电工程学院
甘肃省葡萄与葡萄酒工程学重点实验室
甘肃省干旱生境作物学重点实验室
兰州银行网络金融部
母体文献
林业机械与木工设备
年卷期
2022,50(7)
页码
24-31
年份
2022
分类号
TP242
关键词
机器视觉
机器人
图像处理
分割
激光雷达
文摘内容
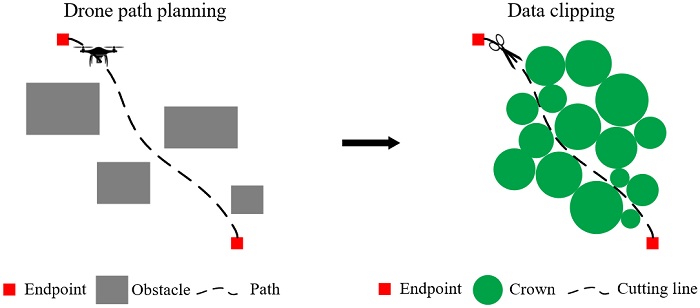
目前果园的人工巡检在面对大规模区域种植时,作业任务极为繁重。基于此研究了一种在果园道路自主行驶的监控车以及机器视觉导航系统。选用基于图优化的Cartographer算法进行果园路面信息采集以及全局路径规划,采用LiDAR(Light Detection and Ranging)进行道路建图和路径规划,利用机器视觉系统进行道路分割识别并提取道路虚拟中线为导航线,并在转角区域等利用激光雷达定位和路径规划。提出了聚类算法和HSV颜色空间分割算法相结合的道路区域图像分割识别算法,并采取形态学滤波和连通域处理降噪方法,实现了果园道路的准确提取。在视觉导航实验研究中,分块并标记道路目标区域中心点,曲率拟合获得导航线,实验结果表明拟合提取的虚拟导航线与道路实际中线偏差小于4%,准确性高,满足机器视觉导航的精度要求。
-
相关记录
更多
- 机器视觉在林业中应用的研究进展 2023
- 激光雷达辅助的样地调查单木定位 2023
- 地形和历史干扰对西双版纳勐仑地区热带森林林冠高度结构的影响 2023
- 基于激光雷达技术的郑州市行道树空间围合度研究 2023
- 近地面激光雷达点云密度对森林冠层结构参数提取准确性的影响 2023
- 基于matlab图像处理的CLT木破率测量方法 2023
相关图谱
相关动态


相关信息